
Группа учёных под руководствомпрофессора Лю Инсяна из Государственной ключевой лаборатории робототехники и систем добилась нового прогресса в проектировании сантиметровых пьезоэлектрических роботов, создав беспроводного трёхопорногоробота с радиальнымипьезоэлектрическимиприводнымимодулями, равномерно распределённымипо окружности. Это обеспечивает всенаправленное движение устройствапоплоскости. Исследование, описывающее данное изобретение,опубликовано в журнале NatureCommunicationsв статье под названием «Всенаправленное движение автономного трёхопорного микроробота с использованием радиальных пьезоэлектрических приводов» (Omnidirectional Motion of an Untethered Tripodal Microrobot Using Radial Piezoelectric Actuators).
Сантиметровые роботы хорошо подходят для выполнения сложных задач в ограниченных и узких пространствах; ониобладают широкими перспективами применения в таких областях, как биомедицина и исследование окружающей среды. Технология пьезоэлектрическогоприводаблагодаря высокой скорости отклика, простой конструкции и удобству миниатюризации предоставляет новое решение для беспроводнойинтеграции систем сантиметровых роботов. Однако реализация эффективного и гибкого движения в условиях жёстких габаритных ограничений остаётся одной из главных проблем для подобных систем.
Для решения этой задачи группа исследователей из ХПУ разработала беспроводного всенаправленного пьезоэлектрического робота с тремя расположенными по окружностипьезоприводами. Синтезируя шесть базовых радиальных движущих сил посредством трех распределенных по окружности пьезоэлектрических модулей и применяя алгоритм интерполяции траектории, робот способендвигаться в любом направлении на плоскости без изменения ориентации корпуса, а также эффективно перемещаться с нагрузкой, в 13,63 раза превышающей его собственный вес, и сохранятьработоспособность даже после падения с высоты 0,6 м и после воздействия статического давления, превышающего собственный вес в 559 раз. Кроме того, за счёт переключения между режимами высокочастотного непрерывного и прерывистого возбуждения робот обладает возможностью возможностью кросс-масштабного движения – от макроскопической скорости 3 см/с до микрошагавеличиной 0,56 мкм, сочетая быстрое перемещение с высокоточноймикроскопической локализацией.Команда создала многослойную конструкцию, разместив модулиуправления, связи, сенсорыи электропитаниев нижнем уровне на сантиметровом пространстве, формируемом трёхопорной структурой. Время автономной работы достигает почти 50 минут (суммарный пройденный путь 62,1 м). Экспериментальные результаты показывают, что на основе предложенной стратегии автономной навигации «точка–точка» робот способен выполнять автономное движение по заданной траектории и демонстрировать режим «лидер–ведомый» при работе нескольких устройств. Такжебылуспешно проведён ряд испытаний, включая прохождение лабиринта, обнаружение утечки газа, выявление царапин на полупроводниковых пластинах и кросс-масштабные микроскопические наблюдения. В дальнейшем данный робот имеет потенциал для интеграции с микромодульными исполнительными системами, что большеповысит возможности совместной работы нескольких устройстви выполнения сложных задач в ограниченных пространствах.
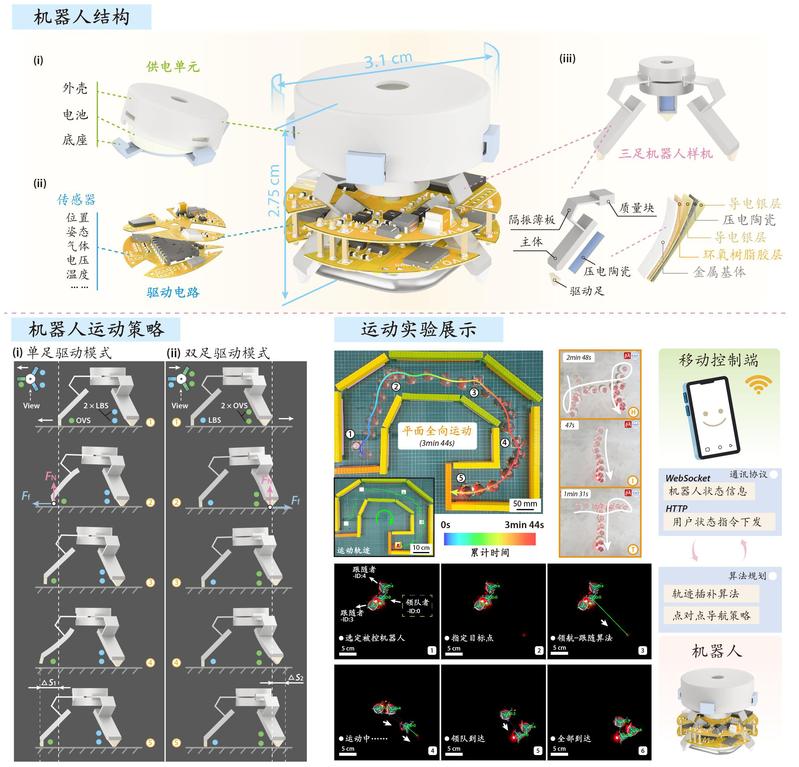
Стратегии управления движением и экспериментальная демонстрация работы миниатюрного трёхопорного пьезоробота
Конструкция трёхопорного пьезоэлектрического робота и демонстрация его движения
ХПУ является единственным учреждением-исполнителем, а также организацией для корреспонденциипо данной работе. Профессора Лю Инсян и Дэн Цзе из Государственной ключевой лаборатории робототехники и систем выступают соавторами-корреспондентами. Аспирант Гао Юй, доцент Ли Цзин и младший научный сотрудник Чжан Шицзин из той же лаборатории являются совместными первыми авторами, внесшими равный вклад в работу. Профессор Янь Цзипэн, магистрант Чжан Илинь, а также докторантыЛю Баои, Гуань Цзинхань и Ван Дэхун также являются соавторами статьи.
Данное исследование выполнено при поддержке Государственного фонда естественных наук Китая, постдокторского фонда провинции Хэйлунцзян, открытого проекта Государственной ключевой лаборатории механических систем и вибрации, а также Китайского постдокторского научного фонда.
Ссылка на статью: https://www.nature.com/articles/s41467-026-72449-x